The best driver model available on the market
차량 모델은 테스트 트랙의 테스트 조건에 최대한 가깝게 시뮬레이션을 수행하기 위해 정확한 물리적 운전자 모델이 필요합니다.
VI-Driver는 점점 더 복잡해지는 통합 시스템 개발을 지원합니다. 차량 플랜트는 정확한 서스펜션, 타이어, 공기역학 및 파워트레인 부품을 갖춘 빠른 다물체 심볼릭 시뮬레이터를 통해 구현됩니다. 도로와 구동 라인 프로필은 분포된 불규칙성, 연석, 범프 및 포트홀과 같은 모든 중요한 특성을 정의할 수 있습니다. 지능형 운전자 모델은 여러 번 자동으로 결정된 도로 구간에서 반복하여 차량의 한계를 탐구할 수 있으며, 차량이 도로에 머물 수 있을 때까지 따라야 할 목표 라인과 실행 전략을 변경합니다.


차량 시스템은 필요한 모든 폐쇄 루프 컨트롤러를 장착할 수 있으며, 목표 조작은 하드웨어 인 더 루프(HIL) 테스트를 위해 오프라인 및/또는 온라인 시뮬레이션 기술을 사용하여 기존 및 외부 연결 가능한 컨트롤러 모델과 결합하여 시뮬레이션할 수 있습니다.
VI-grade는 운전자 모델 개발에 대한 깊은 경험을 보유하고 있으며, 10년 이상의 연구 및 개발 활동의 결과로 VI-Driver 제품을 완성했습니다.
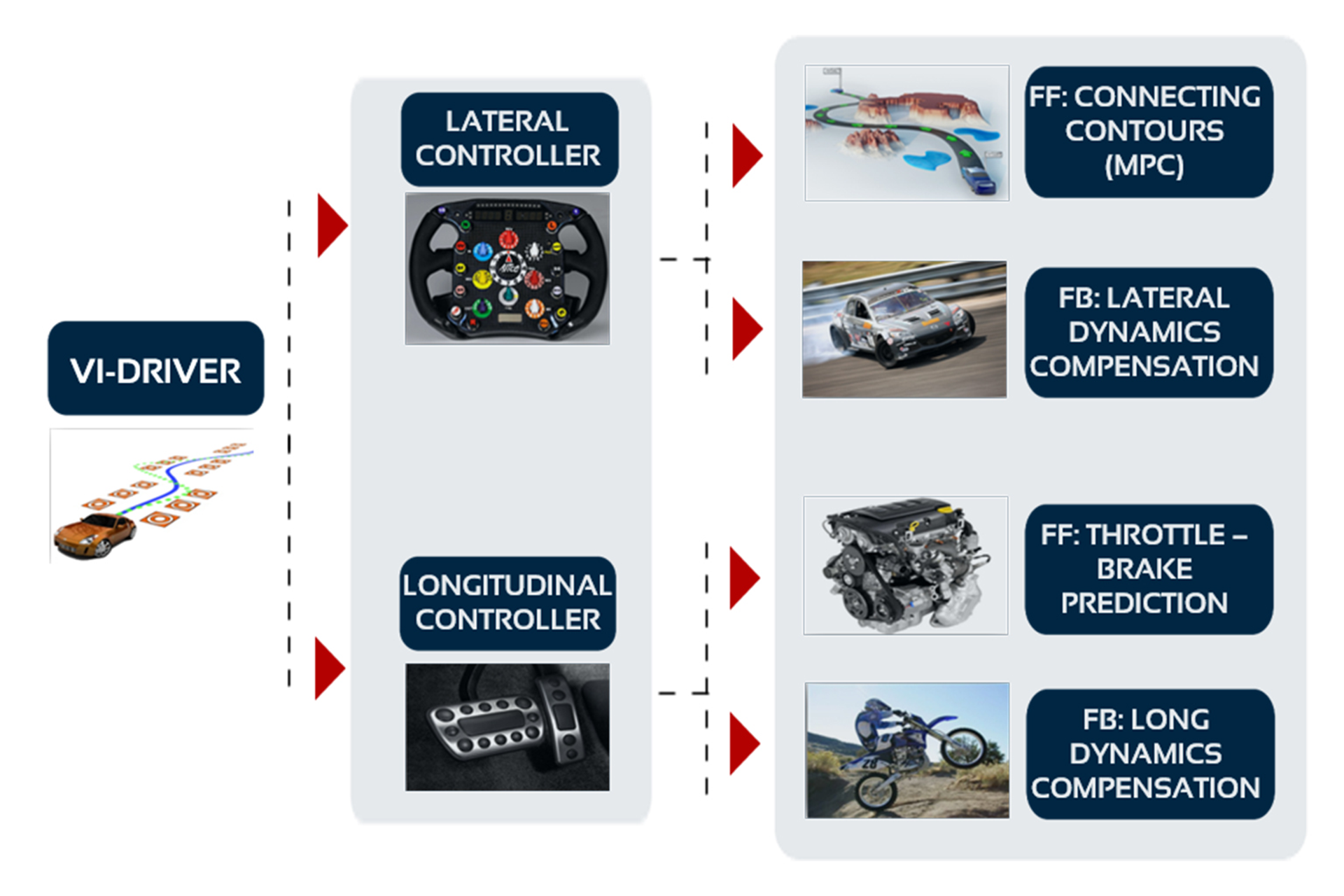
고급 종방향 및 횡방향 컨트롤러를 통해 소프트웨어는 주어진 속도 프로필(예: VI-grade 정적 솔버에서 계산된 프로필 또는 텔레메트리 측정에서 가져온 프로필)을 따르고, 사용자가 정의한 3D 경로에서 반복적인 과정을 통해 차량의 최대 성능을 찾기 위해 모든 차량 운전자 입력 채널을 관리합니다.
VI-Driver는 또한 다양한 클래스의 차량, 차량 솔버 및 도로 표면과 결합하여 핸들링, 내구성 및 ADAS 실험을 지원할 수 있습니다.
Applications
- Ability to drive a virtual vehicle model through a number of different manoeuvres in order to allow users to accurately evaluate the dynamic behaviour of the car
- Support of open-loop manoeuvres (step steer, frequency sweep, …) and closed loop manoeuvres (Steering pad, ISO lane change, …)
- Combination of static and dynamic solver
- Lap time simulation
- Max performance evaluation
- Press Maneuvers (ISO Lane Change, Slalom, Obstacle Avoidance) with cone hitting detection algorithm
Benefits
- State-of-the-art longitudinal and lateral controller
- Robust and precise driveline following algorithm
- Advanced management of all driver channels (steering, throttle, clutch, brake and gear)
- Can be used throughout the entire tool chain from concept to detailed design for Software-in-the-Loop and Hardware-in-the-Loop development