Project Description
PreScan

시나리오를 정의하는 GUI 기반 전 처리기와 이를 실행하기위한 런타임 환경으로 구성된 시뮬레이션 플랫폼입니다. 알고리즘을 만들고 테스트하기위한 엔지니어의 주요 인터페이스에는 MATLAB 및 Simulink가 포함됩니다. PreScan은 MIL (model-based controller design)에서 SIL (software-in-the-loop) 및 HIL (hardware-in-the-loop) 시스템으로 실시간 테스트까지 사용할 수 있습니다.
PreScan은 개방 루프 및 폐쇄 루프, 오프라인 및 온라인 모드에서 작동할 수 있습니다. 타사 차량 역학 모델 (CarSIM, dSPACE ASM 등) 및 타사 HIL 시뮬레이터 / 하드웨어 (예 : ETAS, dSPACE, Vector)에 연결할 수 있는 유연한 인터페이스를 갖춘 개방형 소프트웨어 플랫폼입니다. ADAS 시스템 개발자가 필요로 하는 모든 것을 함께 제공하는 여러 모듈로 구성됩니다. 직관적 인 그래픽 사용자 인터페이스 (GUI)를 통해 시나리오를 구축하고 센서를 모델링 할 수 있으며, Matlab / Simulink 인터페이스를 통해 제어 시스템을 추가 할 수 있습니다. 이 인터페이스는 차량 동역학 모델과 같은 기존 Matlab / Simulink 모델을 가져 오는 데에도 사용할 수 있습니다. 실험을 실행할 때 시각화 뷰어는 시나리오의 사실적인 3D 표현을 제공합니다. 선택적으로 dSPACE Control Desk 및 NI LabVIEW와 같은 툴을 ‘데이터 수집’및 ‘테스트 자동화’와 같은 활동에 사용할 수 있습니다. PreScan은 ADAS 센서 및 제어 시스템을 개발하고 테스트하기위한 포괄적인 기능을 제공합니다. 이 섹션에서는 센서 모델, 접지 진리 센서 모델, 시나리오 생성 기능, 차량 동적 옵션, 수입 업체, 타사 소프트웨어 및 하드웨어와의 인터페이스에 사용 가능한 기능에 대한 개요를 제공합니다.
1. Sensor Models
- Camera (mono and stereo)
- Fisheye camera
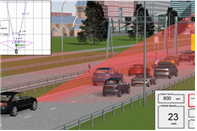
- Radar
- Laser and lidar
- Ultrasonic
- PMD / Time of Flight» E-Horizon from HD-MAP (under development)
- V2V and V2I communication
– DSRC antenna receivers (Rx) and transmitters (Tx)
– Standard message sets (e.g. SAE J2735 BSM) - Infrared (NIR)
- User-defined sensor models

2. Ground truth sensors

- SELF sensor
(providing relevant object information for calibration of tracking and tracing algorithms) - Depth camera
(providing depth values for calibration of stereo camera algorithms) - Lane marker sensor
(providing lane and road information for calibration of lane warning or keeping systems) - Bounding box sensor
(for calibration of object and pedestrian detection algorithms)
3. Scenario

- User-defined road network
(e.g. straight road, curved road, roundabout, crossings) - 3D road segments and embankments
(e.g. sloping roads, hill roads, bridges, fly-overs and speed bumps) - Road infrastructure
(e.g. lane markers, pedestrian crossings, traffic signs, traffic lights, light poles, matrix signs, guard rails) - Road users
(e.g. cars, trucks, animated cyclists & pedestrians) - Animated pedestrians with natural motion
(e.g. male, female and child, various lengths and sizes, carrying suitcase, umbrella, bagpack & bicycle) - Database of buildings, trees & bushes
- Environmental conditions
(day & night conditions, different intensities of rain, fog and snow, dirt spots, street lighting) - Lighting effects
(e.g. illumination, shadows, reflections) - Light reflections from vehicle lights
(On wet roads, vehicle surfaces and reflective road objects) - Reflective road objects
(cat eyes, Botts’dots, guardrail reflectors, roadside poles) - Test automation
(access to model parameters for use in test automation studies)
4. Manoeuvre control

- Open-loop maneuvres with prescribed motion
– Flexible path and speed definition
– Standard scenario sets (EuroNCAP, ADAC, ISO, NHTSA, ECE, ASSESS, etc.)
– Import of recorded GPS tracks - Closed-loop maneuvres with PreScan vehicle dynamics
– Open Simulink model of chassis, transmission and engine
– Lateral and longitudinal controllers (driver models) - Closed-loop maneuvres with 3rd party vehicle dynamics
– Your in-house developed vehicle dynamics codes
– Industry standard vehicle dynamics codes (e.g. CarSim, DYNA4, dSPACE/ASM) - Driver-in-the-Loop using steering console
5. Importers
- Google Sketchup
– Google 3D Warehouse
– Google Earth - GPS tracks
– Open Street Map importer for automated generation of road networks - CAD models (STEP, IGES, 3DXML)
6. Interfacing
- Matlab & Simulink
- ADTF
- veDYNA vehicle dynamics
- CarSim & TruckSim vehicle dynamics
- VI-Grade vehicle dynamics
- dSPACE ASM vehicle dynamics
- AmeSIM vehicle dynamics
- MOMO & Logitech steering console
- dSPACE / Controldesk
- National Instruments / LabVIEW
- HIL tooling (ETAS, dSPACE, National Instruments, OpalRT, Vector)
- PTV Vissim